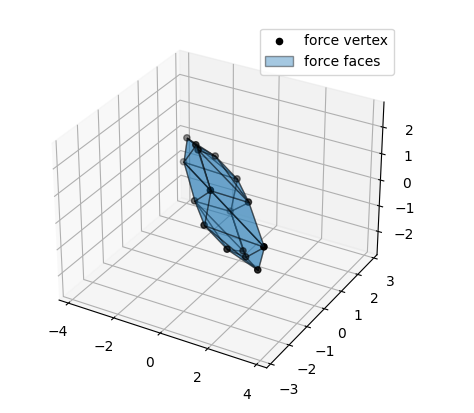
Randomized robot
A simple example program for force polytope evaluation of a randomised robot model. Simply change the number of dof torque limits and see how the calculation time and shape evaluates.
📢 NEW Examples!
- For some more examples check out the
examplesfolder of the repository. Interactive jupyter notebooks are available in the
examples/notebooksfolder: see on Github
import pycapacity.robot as capacity # robot capacity module
import numpy as np
m = 3 # 3d forces
n = 6 # robot dof
# this seed is used to generate the same image
# as in the examples in the docs
np.random.seed(12345)
J = np.array(np.random.rand(m,n)) # random jacobian matrix
t_max = np.ones(n) # joint torque limits max and min
t_min = -np.ones(n)
f_poly = capacity.force_polytope(J,t_min, t_max) # calculate the polytope
print(f_poly.vertices) # display the vertices
# plotting the polytope
import matplotlib.pyplot as plt
from pycapacity.visual import * # pycapacity visualisation tools
fig = plt.figure(4)
# draw faces and vertices
plot_polytope(plot=plt,
polytope=f_poly,
label='force',
edge_color='black',
alpha = 0.4)
plt.legend()
plt.show()